State space example¶
We take a simple system and integrate it numerically
In [2]:
A = matrix([[0, 1],
[-5, -4]])
B = matrix([[0],
[1]])
C = matrix([[1, 0]])
D = matrix([[0]])
ts = linspace(0, 5, 1000)
dt = ts[1]
def u(t):
if t < 0:
return matrix([[0]])
else:
return matrix([[1]])
x0 = matrix([[0],
[0]])
ys = zeros_like(ts)
In [3]:
%%timeit
x = matrix(x0)
for i, t in enumerate(ts):
# Evaluate state-space form
dxdt = A*x + B*u(t)
y = C*x + D*u(t)
# Do integration
x = x + dxdt*dt
# store result
ys[i] = y[0,0]
1 loops, best of 3: 108 ms per loop
Then analytically using the matrix exponential
In [4]:
from scipy.linalg import expm
y_analytic = zeros_like(ts)
b0 = solve(A, -B)
In [5]:
%%timeit
for i, t in enumerate(ts):
y = expm(A*t)*b0
y_analytic[i] = b0[0] - y[0,0]
1 loops, best of 3: 217 ms per loop
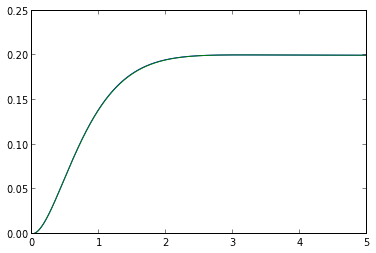
The “analytic” method is slower, but no more accurate
In [6]:
plot(ts, ys, ts, y_analytic)
Out[6]:
[<matplotlib.lines.Line2D at 0x108f1a450>,
<matplotlib.lines.Line2D at 0x108f095d0>]